平面运动具有确定运动的条件
运动副
- 低副:两构件通过面接触
- 移动副
- 转动副
- 高副:两构件通过点或线接触
- 凸轮与从动件
- 齿轮……
机构运动简图
由运动副符号和代表构件的线条来表示机构的运动特性
机构具有确定运动的条件
条件
-
构件自由度大于零
-
原动件的数目等于机构自由度
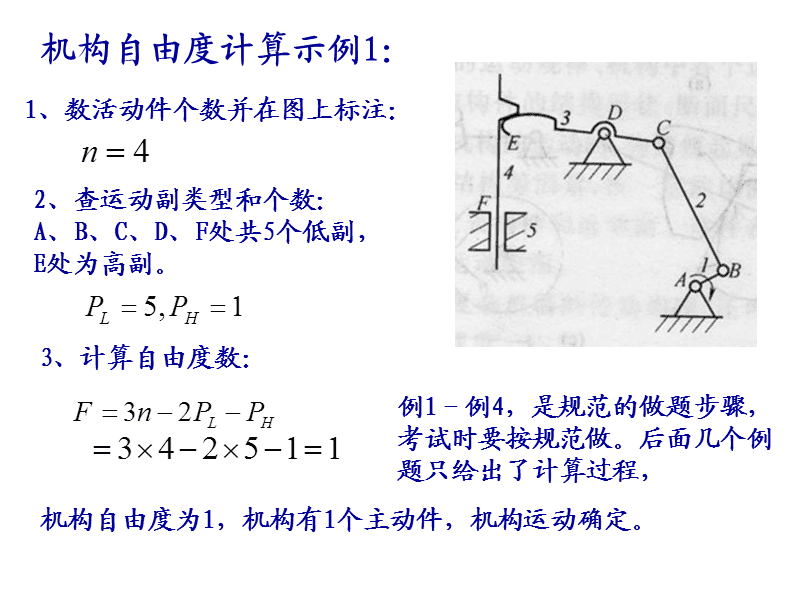
自由度计算
- 机构自由度:指机构中活动构件相对于机架的可能独立运动数目
- 约束:两构件以某种方式组成运动副之后,它们的相对运动就受到约束
- 计算方法
$$n(活动构件数)= N(构件数)-1$$
$$F = 3n-2P_L(低副数)-P_H(高副数)$$
静定(自由度为0)和超静定(自由度为负数)结构可以简化为机架
应注意的问题
复合铰链:一个轴上有多个转动副,m个构件组成的复合铰链含有m-1个转动副
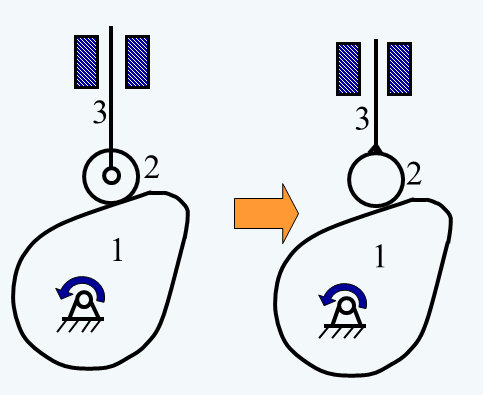
局部自由度:图中滚子只是减少摩擦,滚子转速与机构运动无关,故此转动副不加入计算
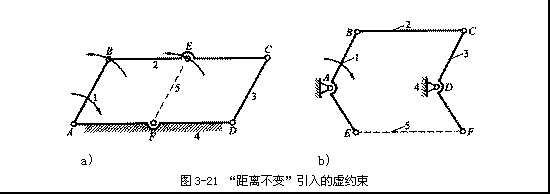
虚约束:与其他运动副作用重复的约束